최근 농업용 로봇이 급속히 관심을 끌고 있다. 노동력 부족, 영농 효율성, 탄소 배출 저감 문제 등을 해결하기 위해서다. 특히 미국 서부 캘리포니아의 와인 농장 등에서는 과수원 제초와 수확용 등으로 자율이동차량(로봇) 농기계를 널리 사용하고 있다. 다만 보급 확산을 위해 추가로 해결할 과제가 있다. 농업용 로봇의 활용도를 높일 수 있으려면 작물이 울창하게 자란 아이오와주 옥수수밭에서처럼 위치를 혼동하기 쉬운 환경에서 작업하거나 이동할 때 정확히 지형을 알 수 있어야 한다.
영국 에든버러대학교 정보과학대의 레 주 연구팀은 최근 이런 환경에서도 길을 헷갈리지 않고 자율이동로봇을 운용할 수 있게 해주는 기술을 알아냈다. 말 그대로 ‘개미의 지혜’를 빌어 왔다. 즉, 개미의 뇌를 분석해 풀이 많은 유사한 환경에서 먹이를 찾아 집까지 돌아오는 항법(경로 탐색)의 비밀을 찾아냈고, 이를 뉴로모픽(뇌신경망을 본뜬) 컴퓨팅에 적용한 것이다. 연구진은 이제 이 모델을 로봇의 환경 인식을 향상시키기 위해 후각이나 소리와 같은 다른 감각 양식으로 확장할 수 있다고 말하고 있다.
키큰 옥수수숲 등에서도 거뜬히 위치 탐색하고 작업

울창한 숲이나 옥수수같이 키 큰 작물로 가득한 곳에서 길을 찾으려는 로봇을 상상해 보라.
경치가 변하기 때문에 친숙한 랜드마크에 의존할 수 없게 되고 모든 것이 똑같아 보인다.
이 시나리오에서 로봇이 다니는 경로는 자기 유사성이 높고 고르지 않은 지형에서 변화하는 조명 조건과 움직임에 영향을 받을 가능성이 높으며 나뭇잎에 대한 바람의 영향은 입력치 변화 가능성을 증가시키는 환경이다.
이런 상황에서 과학자들은 중대한 도전에 직면한다.
로봇들이 스스로 어디에 있었는지 기억하고 앞서 방문했던 장소들을 인식하도록 도울 수 있는지 알아내야 하는 것이다.
다행히도 영국 에든버러대학교 과학자들은 개미의 뇌 구조를 모방해 키 큰 옥수수 밭과 같은 복잡한 자연 환경에서도 로봇이 경로를 인식하고 기억할 수 있도록 도와주는 새로운 인공 신경망을 개발했다.
농업용 로봇은 특히 울창한 식물생태계에서 시각적 탐색이 어려운 과제로 남아있는 로봇 응용 분야다. 에든버러대 연구진의 접근 방식은 밀집하고 식물이 가득한 풍경을 이동해야 하는 농업용 로봇의 성능을 향상시킬 수 있다.
타고난 항법기술 탑재자 개미
개미들은 비교적 간단한 감각계와 신경계를 가지고 있음에도 불구하고 뛰어난 항법, 즉 경로탐색 기술을 가지고 있는 것으로 알려져 있다.
에든버러대 연구진은 먹이 경로탐색 등을 위해 상대적으로 제한된 감각계 및 신경계로 복잡한 자연 환경에서 학습하고 경로를 따를 수 있는 개미와 같은 곤충에게서 영감을 얻을 수 있었다.
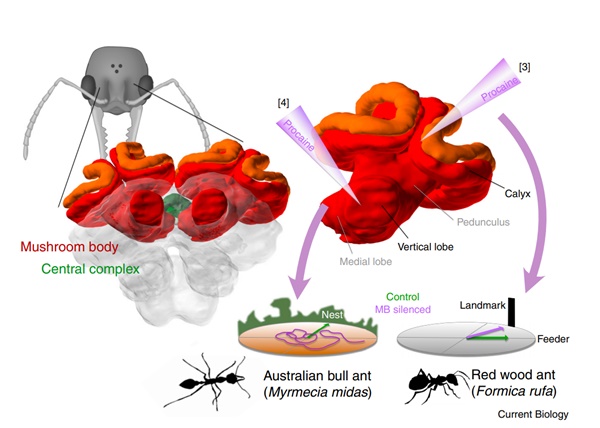
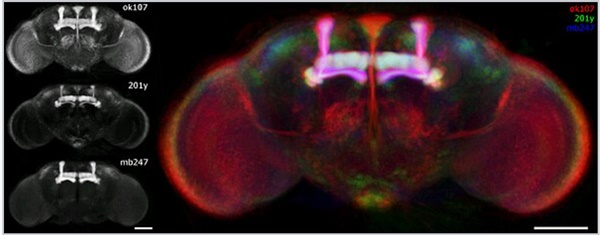
개미들은 뇌에 있는 버섯과 같은 모양의 뉴런(신경망 단위) 구조, 즉 ‘버섯 본체(mushroom body)’를 사용한다. 개미들의 이 뇌 구조는 숲이나 초원과 같이 시각적으로 반복되는 환경에서 학습하고 경로를 따라갈 수 있게 해 준다.
이러한 구조는 시각적 패턴을 감지하고 시공간적 기억을 저장하는 데 도움을 준다.
이러한 생물학적 메커니즘에 영감을 받은 에든버러대학교의 레 주와 동료들은 지상 로봇에 개미에게서 영감을 받은 이벤트 카메라로 야외 자연 환경에서 경로를 따라 시각적 시퀀스(연속물)를 수집하고 곤충 뇌에 있는 신경회로로 알려진 버섯본체에 기반한 시공간 기억을 위한 신경 알고리즘을 적용했다.
이들은 저전력 뉴로모픽 컴퓨터에서 작동하는 스파이킹 신경망에서 메모리를 암호화하기 위해 생물학적 뉴런의 구조와 기능을 모방한 뉴로모픽(뇌 신경망을 본뜬) 컴퓨팅을 사용했다. 많은 로봇 응용 프로그램의 경우 상대적으로 전력이 낮고 효율적인 탑재 솔루션을 갖는 것이 바람직하다. 스파이킹 신경망은 생물학적 신경망으로서 정보 전달을 위해 짧고 날카로운 전압 증가를 사용한다. 이러한 신호를 설명하기 위해 활동전위, 스파이크 및 펄스가 모두 사용된다. 2층으로 된 피드-포워드(feed-forward) 워크다.
다양한 환경·다양한 경로에서 테스트 통과
이들은 개미에게서 영감받은 신경망 모델을 초원, 삼림지대, 농경지와 같은 다양한 환경의 다른 경로에서 테스트했다. 예를 들면 동일한 경로에서 반복 실행되거나 작은 분기점이 있는 경로를 지나다니게 해 평가했다.
연구원들은 뉴로모픽 컴퓨터에서 실행되는 스파이킹 신경망에 메모리를 인코딩해 이벤트 카메라 영상에서 실시간으로 시각적 친숙도를 평가할 수 있었다.
그 결과 연구원들은 이 모델이 로봇의 시각적 항법(경로 탐색)을 위한 경로 인식을 지원할 가능성이 있으며, 이것이 SeqSLAM(영상의 시퀀스를 일치시켜 서로 다른 실행들 사이에서 유사성을 찾는 기술)보다 더 강력하다는 것을 보여주었다.
연구원들은 개미에서 영감을 받은 신경 모델이 울창한 초목 등 시각적 탐색이 여전히 어려운 농업용 로봇 같은 응용 분야에서 유용할 수 있다고 말했다.
그들은 이 모델을 로봇의 환경 인식을 향상시키기 위해 후각이나 소리와 같은 다른 감각 양식으로 확장할 수 있다고 제시하고 있다.
개미의 시각적 탐색 비밀이 풀리기 시작하다
개미의 시각적 탐색은 오랫동안 실험 연구의 초점이었다. 지난 2020년 영국 서섹스대 생명과학대 연구팀은 커런트 바이올로지 9월 7일자에 개미의 기본 신경 회로에 대한 명확한 가설을 제시하기에 이른다. 이들의 연구결과 개미 뇌의 버섯본체(MB)가 개미의 탐색(항법) 작업시 시각적 메모리의 기판일 수 있다는 간접적 증거가 제시됐고, 컴퓨팅 모델링은 버섯몸체 신경 아키텍처가 탐색기능을 지원한다는 것을 보여주었다.
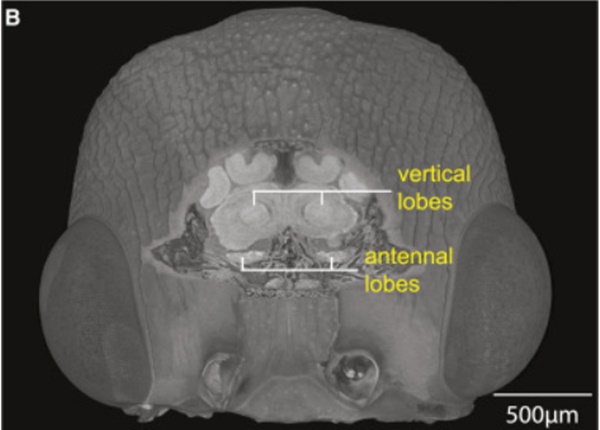
비슷한 시기 호주 맥쿼리대 연구팀도 버섯본체 아랫부분에 있는 수직 엽(葉)이 시각적 탐색에 중요한 역할을 한다는 것을 밝혀냈다.
에든버러대학교 연구팀의 연구성과는 사이언스 로보틱스 9월 27일자에 실렸다. 이 연구는 지난 2020년 커런트바이올로지에 소개된 서섹스대연구팀의 개미뇌 연구, 그리고 호주 맥쿼리대학교 연구팀의 버섯본체 수직엽과 시각 연관성에 대한 연구에 이어 나온 것이다.
생물의 기능 연구가 로봇 기술 개발에 기여하는 경우는 과거에도 그랬고 앞으로도 더 많아질 것으로 보인다.