날로 휴머노이드 로봇의 햅틱(촉각)에 대한 연구가 발전중인 가운데 중국 과학자들이 인간의 접촉 인식 메커니즘을 흉내내 피부밑 또는 물체의 표면 아랫부분을 인식하고 지도까지 그려내는 스마트 생체 손가락을 만들어 냈다. 바이오닉 손가락에 어떤 장치도 하지 않고 그대로 물체 표면을 터치하는 것만으로도 물질 표면 아래쪽을(촉각 단층 촬영을 통해) 자세히 감지할 수 있다는 게 자랑이다. 이들은 이 바이오닉 손가락이 촉각으로 인체 조직, 전자 장치 내부를 인식할 수 있다는 것을 확인했다.
셀 리포트 피지컬 사이언스(Cell Reports Physical Science) 저널 최근호는 이같은 내용의 중국 우위대학교(武夷学院) 연구진의 성과를 공개했다.
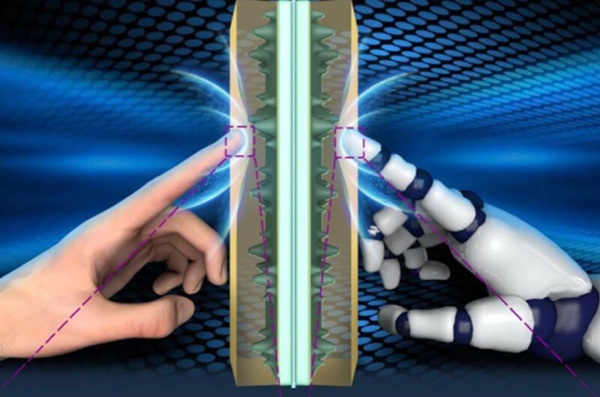
인간의 손끝은 촉각을 통해 우리 환경의 물체를 감지하는 매우 민감한 도구다
중국 과학자 팀이 만든 생체손가락은 손가락 촉각 아래 있는 인지 메커니즘을 흉내낸 것이다. 특이한 것은 이 생체손가락은 복잡한 물체를 찔러 그 표면층 아래에 있는 세부사항을 알아낼 수 있는 통합된 측각 피드백 시스템을 가졌다는 점이다.
인간이 피부의 기계적 감각수용기와 햅틱 감각 처리에 대해 알고 있는 기본 메커니즘은 대부분 인간과 영장류의 손, 특히 신체에서 가장 민감한 위치 중 하나인 손 끝에 대한 연구에서 비롯된다. 로봇손에는 피부에서 발견되는 것과 유사한 기능을 하는 센서와 조작 조건에 따라 변화하는 감각 입력에 빠르게 반응할 수 있는 모터 등도 필요하다.
중국 연구진은 그런 다양한 촉각 관련 연구가 이뤄지는 가운데 지금까지의 단순한 촉각에서 더 나아간 정밀한 촉각을 구현한 것으로 이해할 수 있다.

이 연구 공동 참여자인 우위대학교(武夷学院) 루오 지안 연구원은 “우리는 우리가 알고 있는 가장 민감한 촉각을 가진 인간의 손가락에서 영감을 얻었다”고 말했다.
그는 “예를 들어 우리가 손가락으로 우리 자신의 몸을 만질 때, 우리는 피부의 질감뿐만 아니라 그 아래에 있는 뼈의 윤곽도 감지할 수 있다. 우리의 바이오닉 촉각 손가락 기술은 인체의 비파괴 검사와 유연한 전자 장치를 위한 비광학적인 길을 열어준다”고 말한다.
기존 바이오닉 촉각 손가락 한계 넘었다

연구팀에 따르면 기존에 개발된 인공 촉각 센서는 외형, 표면 질감, 굳은 정도만 인식하고 구별하는 데 그치고 있다. 이 기존 방식으로는 물질들의 표면 아래 정보를 감지할 수 없다. 여기에는 일반적으로 컴퓨터단층촬영(CT) 스캔, PET(양전자 단층 촬영) 스캔, 초음파 단층 촬영(내부 구조의 이미지를 재구성하기 위해 재료의 외부를 스캔) 또는 MRI(자기공명영상)와 같은 광학 기술이 필요하다.
하지만 이것들은 모두 단점을 가지고 있다. 광학 프로파일 측정법(프로필로메트리·profilometry)은 표면의 프로파일과 마감부분을 측정하는 데 종종 사용되지만 투명한 재료에서만 작동한다. (프로필로미터에 의한 외형검사법은 원자력 연료핀의 형상 측정에 사용되며 바닥에 수직방향으로 유지된 연료핀을 게이지 유니트가 상하로 이동하여 차동(差動)트랜스에 의해 표면 형상·휨·직경 변화 등을 기록한다.)
물체표면 및 구조 감지 원리는?
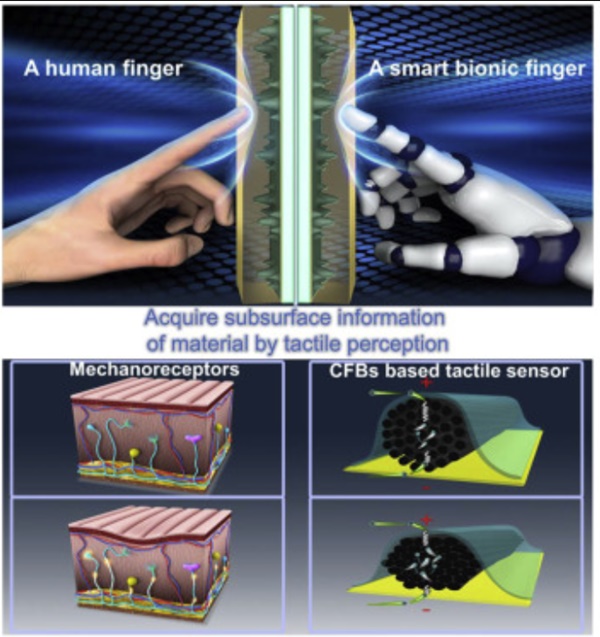
우리가 손가락으로 무언가를 만질 때 피부는 압박이나 스트레칭과 같은 기계적 변형을 경험하는데 이는 기계 수용체가 전기적인 자극을 보내도록 촉발한다. (일반적으로 촉감 시스템에서는 손가락 끝이나 입처럼 기계적 감각 수용기의 밀도가 더 높을수록 우수한 촉각 구별력을 갖는다.)
이 자극들은 중추 신경계를 통해 뇌의 체성감각피질(somatosensory cortex·몸감각피질)로 이동한다. (체성감각계는 한꺼번에 통칭해 피부감각이라고 부른다. 피부를 통해서 느낄 수 있는 감각은 일반적으로 접촉감, 온도감, 통증, 가려움으로 분류된다.) 즉, 뇌는 이러한 전기적 자극을 통합해 우리가 만지는 물체의 특징을 식별한다.
이 촉각 피드백은 우리가 재료의 형태, 표면 질감, 딱딱함 또는 부드러움을 인식할 수 있게 해 준다. 중국 우위대학교 연구진이 개발한 스마트 바이오닉 손가락은 이 피드백 시스템을 모방했다.
손가락 상단에 장착된 금속 실린더가 접촉 끝 단 역할을 하는 반면, 탄소 섬유 빔은 촉각 기계 수용기(감지 장치) 역할을 한다. 이들이 신호 처리 모듈에 연결된다. 손가락은 대상 물질 표면을 주기적으로 찌르거나 자극하는 것처럼 압력을 가함으로써 대상물의 표면을 스캔한다. 물체를 찌르면 바이오닉 손가락의 탄소 섬유를 압축하며, 이 물질이 얼마나 압축되는지를 통해 상대적 딱딱함 또는 부드러움에 대한 정보를 전달하게 된다. 이 정보가 표면 어디서 기록된 것인지와 함께 컴퓨터로 전송되고, 컴퓨터는 데이터를 3D 지도로 변환한다.
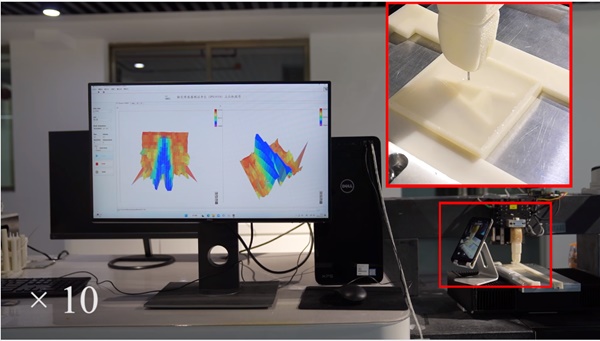
연구진은 서로 다른 복잡한 물체를 사용해 이러한 생체 공학 손가락 능력을 시험해 보았다.
예를 들어 그들은 이 손가락이 부드러운 실리콘 층 바로 아래에 있는 단단한 ‘A’ 글자와 다른 추상적인 형태를 감지하고 그려낼 수 있는지 테스트했다. 손가락은 심지어 단단한 내부 재료와 부드러운 내부 재료, 그리고 부드러운 외부 실리콘 코팅의 차이를 구별할 수 있었다. 연구진은 3D 프린팅 기법을 사용해 3개의 하드 폴리머층(두개골)과 부드러운 실리콘외피층(근육)으로 물리적 인간 조직 모델을 만들었다. 이 생체 공학 손가락은 이 3D프린팅 모델의 ‘근육’층 아래에 위치한 ‘혈관’의 위치를 포함해 모델 조직의 구조에 대한 3D 프로파일을 스캔해 성공적으로 재현했다.
연구진은 또 결함이 있는 전자 장치를 대상으로 생체 공학 손가락을 테스트해 성 내부 구성 요소 지도를 만드는 데 성공했다. 이 손가락은 주변 외층을 뚫지 않고도 전자제품의 회로 연결이 끊어진 위치를 정확히 파악할 수 있었고 부적절하게 뚫린 구멍을 식별할 수 있었다.
루오연구원은 “우리는 다음에는 다양한 표면 물질 표면을 전방향으로 탐지하는 생체 공학 손가락 능력을 개발하고 싶다”고 말했다.
최근 지난해 가을 샤오미가 휴머노이드 로봇 ‘사이버원’을 공개하면서 인간의 감정을 이해하는 능력을 부여했다고 했다. 테슬라도 휴머노이드 로봇 ‘옵티머스’를 공개하면서 수년내 공장에서 인간을 도울 수 있을 것이라고 했다. 이 생체공학 손가락은 휴머노이드 로봇들이 촉각으로 물체들을 더 잘 감지하면서 더욱더 인간을 닮은 휴머노이드 로봇을 만들게 해 줄 것으로 보인다.


















소셜댓글