새들은 어떤 나뭇가지에라도 앉을 수 있다. 이들이 내려앉는 가지는 제 각각 크기, 모양, 질감이 다를 수 있다. 가지가 젖어있거나 이끼로 덮여 있거나 부스러기가 터질 수도 있다. 하지만 새들은 그 어느 나뭇가지에도 안정감 있게 내려 앉는다.
이 같은 새들의 능력은 스탠포드대 실험실 연구원들의 큰 관심을 끌었다. 이들은 이미 동물에서 영감을 받은 기술을 개발한 기술자이기도 하다. 두 실험실의 대학원생이었던 윌리엄 로데릭 박사는 “새들이 날아서 횃대에 앉는 방법을 흉내 내는 것은 쉽지 않다. 수백만 년의 진화 끝에 이들은 숲 속 나뭇가지들의 복잡성과 다양성에도 불구하고 이착륙을 매우 쉽게 보이게 만든다”고 말한다.

연구원들은 수년간 새의 나뭇가지 착지 능력과 항공로봇에 대해 연구한 결과 그들만의 기술로 횃대에 내려앉는 로봇을 만들 수 있었다. 그리고 이를 사이언스로보틱스 12월 1일자에 발표했다.
이들은 새에서 영감을 받은 ‘스낵(SNAG)’으로 불리는 집게를 드론(쿼드로콥터)에 결합시켰다. 이제 이들은 날아다니면서 물체를 잡고, 운반하며, 다양한 표면에 앉을 수 있는 로봇이 됐다. ‘스낵’은 ‘자연에서 영감을 받은 판에 박힌 공중 집게(Stereotyped Nature-inspired Aerial Grasper)’의 약자다.
이 연구원들은 이번 연구 성과 발표에 앞서 2년전 5대의 고속 카메라를 사용해 작은 앵무새가 특별한 횃대 사이를 왔다 갔다 하는 모습을 촬영해 이들이 나무에 주는 부하를 분석했다.
이들은 새들이 다양한 크기와 재질(나무, 스티로폼, 사포, 테플론 등)의 횃대에 착지할 때, 횃대에 앉아 있을 때, 이륙할 때의 물리적 힘을 포착하는 센서를 횃대에 설치했다.
로데릭 연구원은 “우리를 놀라게 한 것은 새들이 어떤 표면에 착륙하든 상관없이 동일한 공중 기동을 했다는 것이다. 그들은 자신들의 발로 표면 질감 자체의 다양성과 복잡성에 대응하게 할 수 있었다. 모든 조류 착륙에서 볼 수 있는 이러한 공식화된 듯한 행동은 스낵의 ‘S’가 ‘판에 박힌(stereotyped)’을 의미하는 이유다”라고 말했다.
연구원들이 개발한 스낵 로봇도 모든 착륙시 실험에 사용했던 앵무새와 같은 방식으로 착륙한다.

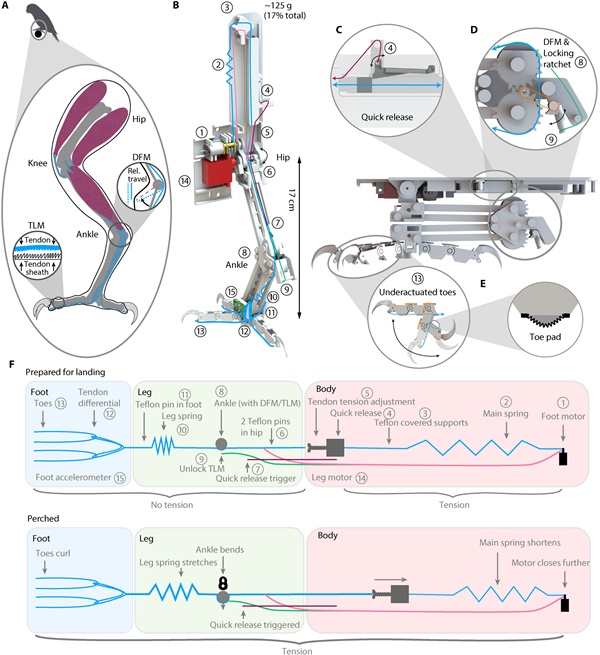
그러나 쿼드콥터의 크기에 맞추기 위해 스낵은 송골매의 다리에 기반해 만들어졌다. 뼈 대신 3D 프린팅된 구조를 갖추었으며 근육과 힘줄을 반영하는 모터와 낚싯줄도 갖추고 있다.
다리마다 앞뒤로 움직일 수 있는 모터와 나뭇가지를 움켜쥐기 위한 모터가 장착됐다. 새의 발목 주위로 힘줄이 돌아가는 방식에서 영감을 받은 로봇 다리의 유사 메커니즘이 착륙 충격 에너지를 흡수하고 이를 수동적으로 잡는 힘으로 변환한다.
그 결과 로봇은 20밀리초(1000분의 20초) 안에 닫히도록 작동하는 강력하고도 빠른 속도의 클러치를 갖게 됐다.
일단 새의 발톱을 닮은 발로 나뭇가지를 감싸면 스낵의 발목 잠금과 오른발의 가속도계가 로봇이 착륙했음을 알리고, 이어 균형 조정 알고리즘이 작동되면서 나뭇가지 위에서의 위치를 안정시킨다.
로데릭은 코로나19 팬데믹(세계적 대유행) 기간 동안 3D 프린터를 포함한 장비들을 스탠포드대에서 오리건 주 시골로 옮겨 지하 실험실을 차렸다.
그는 여기서 로봇이 다양한 시나리오에서 어떻게 작동하는지 알아보기 위한 연구를 시도했다.
레일시스템을 이용해 스낵을 미리 정의된 속도와 방향으로 다양한 (나뭇가지등의) 표면으로 발사했다. 그는 스낵이 자리를 잡으면서 손으로 던진 가짜 먹잇감, 작은 트래픽 콘, 테니스공 등을 잡는 능력도 확인했다.
마침내 로데릭은 현실세계에서 이를 시험해 보기 위해 스낵을 데리고 근처숲으로 갔다.
스낵은 전반적으로 매우 뛰어난 능력을 보여주었다. 이제 다음 단계의 초점은 로봇의 상황 인식과 비행 제어 능력 향상처럼 착륙 전에 일어나는 일에 초점을 맞춰지게 됐다.
이 로봇을 주목할 만한 이유는 수색과 구조, 산불 감시를 포함한 수많은 활용 분야가 있다는 점 때문이다. 이는 또한 드론 이외의 기술에도 부착될 수 있다. 대개 드론 작동시간이 30분 정도로 짧지만 이렇게 나뭇가지에 앉아 있을 수 있다면 계속 비행하지 않아도 돼 오랫동안 현장 더 가까운 곳에 머무를 수 있다.
스낵과 조류와의 근접성은 또한 조류 생물학에 대한 독특한 통찰력을 가능케 해 주기도 한다. 예를 들어 연구원들은 두 개의 다른 발가락 배열 형태로 로봇을 작동시켜 봤다.
즉, 하나는 송골매처럼 앞에 발가락이 세 개 있고 뒤에 하나가 있는 삼전지형(三前指型)의 새, 그리고 다른하나는 앵무새나 딱따구리처럼 앞과 뒤에 각각 두 개의 발가락이 있는 대지족(對指足)의 새처럼 배열해 착지 시험을 했다.
연구원들은 놀랍게도 둘 사이에 나뭇가지를 쥐고 버티는 기능상의 차이가 거의 없다는 것을 발견했다.

생물학자를 부모로 둔 로데릭에게 스낵을 적용할 가장 흥미로운 응용 분야는 환경연구다. 그를 포함한 연구진은 이를 위해 로봇에 온습도 센서도 부착해 오리건주의 미세기후를 기록하는 데 사용했다.
로데릭은 “이 연구의 근본적인 동기 중 하나는 자연 세계를 연구하는 데 사용할 수 있는 도구를 만드는 것이었다”고 밝혔다. 그는 “만약 우리가 새처럼 행동할 수 있는 로봇을 가질 수 있다면 이는 환경을 연구하는 완전히 새로운 방법을 열 수 있을 것”이라고 설명했다.
이번 성과는 2년 전인 2019년 8월 같은 스탠포드대 연구진이 8월 6일 e라이프(eLife)에 발표한 연구그룹의 내용을 더 진전시킨 결과다.
당시 같은 스탠포드대 연구실 대학원생들은 ‘개리’로 이름붙인 파랑새와 다른 두 마리의 새들이 어떻게 다양한 자연 횃대와 거품, 사포, 테플론으로 덮인 인공 횃대를 포함한 다른 종류의 표면에 착륙하는지에 대한 데이터를 수집했다. 이 앵무새들은 인간들이 보기엔 거의 불가능해 보이는 것을 쉽게 해냈다. 당시 논문의 수석저자인 렌팅크는 “이것은 올림픽 체조 선수에게 손에 초크 가루를 바르지 않고 테플론으로 덮인 높은 막대에 착지할 것을 요구하는 것과 다르지 않다”고 말했다.
이들은 이 새들의 발톱과 발에 의해 생성되는 마찰에 대한 자세한 연구를 포함시켰다. 이 연구원들은 연구를 통해 앵무새의 다재다능함의 비밀이 그립에 있다는 것을 발견했다.
친 연구원은 당시 “우리는 발과 발톱의 운동학, 즉 그들이 발을 어떻게 움직였는지 자세히 조사하기 시작했고, 발에 착지하는 곳에 붙이도록 적응한다는 것을 발견했다. 새들이 발가락을 감싸고 발톱을 웅크리는 정도는 착륙할 때 무엇을 만나느냐에 따라 달랐다. 중간 크기의 폼, 사포, 거친 나무 횃대와 같은 거칠거나 질퍽한 표면에서 그들의 발은 발톱의 도움을 거의 받지 않고도 높은 압착력을 발생시킬 수 있다. 뽕나무, 테플론, 큰 자작나무 등 가장 잡기 힘든 횃대 위에서 새들은 발톱을 더 웅크리고 발로 확실하게 자리잡을 때까지 표면을 끌어당겼다”고 밝혔다.
이 가변 방식의 그립은 연구자들이 다양한 표면에 착지할 로봇을 제작할 때 착륙 접근 제어와 성공적 착륙을 위해 필요한 행동을 분리할 수도 있다는 것을 시사한다.
연구원들의 측정 결과, 새들은 단 1~2밀리초 만에 혹이나 구멍을 움켜쥐던 발톱의 위치를 아른 곳으로 바꿀 수 있는 것으로 나타났다. 사람이 눈을 깜빡이는데 걸리는 시간은 100~400밀리초(1밀리초=1000분의 1초)다.

스탠포드대의 성과는 획기적인 것이지만 이 엄청난 성과의 선구자로 최소한 일본 히로시마대 연구팀을 빼놓을 수 없을 것이다.
지난 2017년 6월 일본 히로시마대학의 다카키켄(高木健) 교수팀은 드론과 새의 발을 가진 로봇을 개발했다고 발표했다.
드론이 비행하다가 파이프를 잡고 있더라도 드론의 몸체가 흔들리지 않았다. 보통 드론은 비행중 흔들리기 쉽다. 새들이 나뭇 가지에 앉는 것처럼 드론 로봇팔이 파이프를 잡고 머물도록 하는 데 성공한 것이다.
이 로봇발의 길이는 50cm다. 발을 뻗어도 40cm 정도의 범위에선 무게 중심이 변하지 않는다. 페트병의 회수나 밧줄 작업 등을 할 수 있다. 로봇 발의 무게는 2.2kg인데 4kg의 물건을 들 수 있다. 교량 및 빌딩 등의 높은 곳에 머무르고 카메라로 촬영하거나 물건을 전달하는 작업을 할 수 있을 것으로 기대를 모았다. 당시 히로시마대 연구팀은 일본 내각부의 ‘혁신적인 연구 개발 추진 프로그램(ImPACT)’ 과제로 이 연구를 실행했다.
이번 스탠포드 연구진의 성과는 라이트형제가 비행기 개발과정에서 방향 전환 방법을 찾아낸 것을 떠올리게 한다. 형제는 대머리 독수리를 관찰한 결과 날개 끝부분을 비틀면서 선회한다는 사실을 알아내고 도드래와 줄들로 이뤄진 장치를 통해 독수리의 날갯짓을 흉내냈다. 이로써 공중에서 비행기의 균형을 잡을 수 있었다. 이는 인류최초의 비행기 발명으로 이어졌다.
아래 소개하는 3편의 동영상은 이 새의 발에서 영감받은 착지기술 진화과정을 순서대로 보여준다.
위에서부터 차례로 스탠포드대 로데릭연구원이 설명하는 스낵의 작동 모습, 2019년 스탠포드대 연구진의 연구성과, 2017년 히로시마대 연구진의 봉을 잡고 균형잡고 있다고 이륙하는 드론의 모습 동영상이다.

















소셜댓글