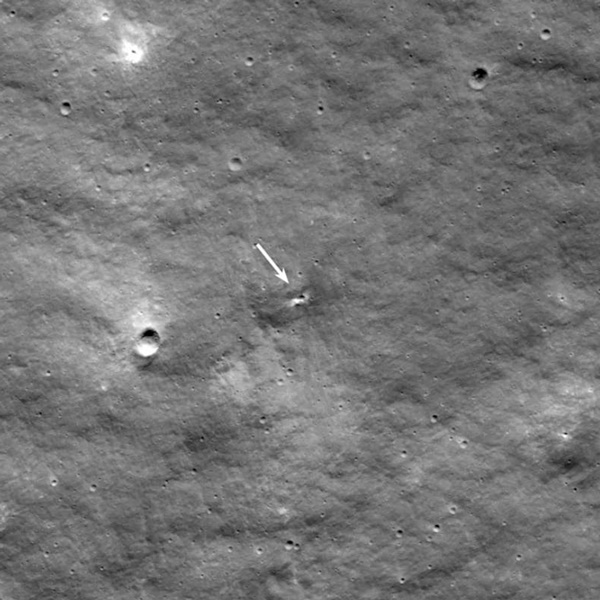
지난달 러시아의 달남극 무인착륙선 루나 25가 착륙중 속도를 줄이지 못하고 그대로 충돌해 버린 사고가 있었다. 지구 충력의 6분의 1밖에 되지 않는 달이지만 이처럼 중력없는 곳에서의 안착은 최적의 컴퓨팅에 의한 최적의 제어를 요구한다. 러시아와 달리 인도는 안전하게 착륙선과 로봇을 달 남극부근에 착륙시켰다.
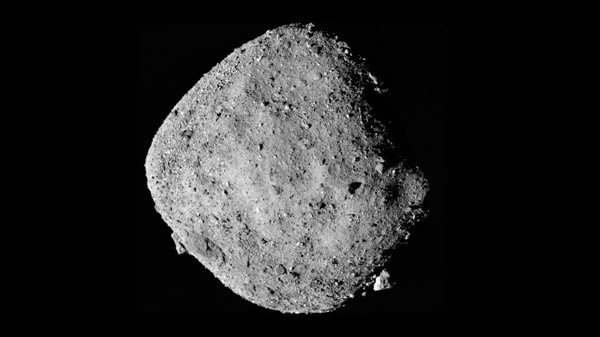
그러면 중력이 지구상의 수백만분의 1에 불과한 소행성 착륙의 경우는 어떨까. ‘중력’이란 단어를 사용하는 것조차도 가당치 않아 보인다. 그 대표적 예는 지구에서 3억km 떨어진 B급 소행성 베누(지름 약 500m)로부터 표토와 자갈을 채취해 오는 24일 지구로 샘플을 갖다줄 미항공우주국(NASA·나사) 탐사선 오시리스-렉스가 될 것이다. 사실 오시리스-렉스는 소행성 베누에 착륙조차 하지 못했다. 총 7년 간의 프로젝트 기간 동안 단 16초란 짧은 시간 동안, 그것도 로봇팔로 가스를 쏘아 베누 지표면 샘플이 튀어오르게 해 채취해 온 것일 뿐이다. 소행성 착륙이란 언감생심이다.
그런데 앞으로 이런 방식의 소행성 탐사에 변화가 생길 것 같다. 최근 소행성에 착륙할 수 있는 우주선 모델이 등장해 향후 소행성 탐사 기대감을 높여주고 있다. (사실 소행성은 너무 작아서 우주선이 착륙할 때 부서지거나, 미끄러져 표면에서 이탈하게 될 가능성이 높다.)
나사의 주도로 연구되고 있는 미래 소행성 탐사로봇에 대해 알아봤다. 식물에서 영감을 받는 디자인과 특수 중합체를 사용한 소행성 소프트 랜딩(연착)용 탐사로봇이 설계되고 있다. 소행성 표면에 우주선이 붙어있게 하기 위해 물체표면 분자 간에 서로 끌어당기는 힘인 반데르발스 힘 사용이 유력시되고 있다. 향후 소행성에 우주선을 착륙시키게 되면 그 다음은 소행성 희귀광물 채굴로 이어질 것이다. 이 착륙 기술에는 생체(수련·睡蓮)꽃에서 영감을 받는 미메틱스 로봇기술과 물리학이 자리한다. IEEE스펙트럼의 최신 보도와 미 행성학회 웹페이지를 참고해 소행성에 착륙하게 될 미래 우주선에 대해 알아봤다.
(오시리스-렉스는 오는 24일 밀폐된 회수 용기(캡슐)에 담긴 베누 소행성 표토 샘플을 지구상공 10만km에서 미국 유타주 사막으로 떨어뜨려 전달한다. 이어 이어 오시리스-렉스는 이름을 오시리스-에이펙스로 바꾸고 똑같은 방식으로 2029년으로 예상되는 아포피스 소행성 표본 채취 탐사 여행에 나서게 된다. 과학자들은 이들을 분석해 태양계 형성과 생명의 기원을 연구하고자 한다.)
소행성 베누 토양은 가져왔지만 긴 관으로 16초 동안 터치에 그쳐
오시리스-렉스는 달과 비교하기 힘들 정도로 중력도, 크기도 작고, 게다가 부스러지기도 쉬운 소행성이다 보니 표토 채취를 위해 착륙하려면 당연히 엄청난 위험에 직면하게 된다.
그런 만큼 오시리스-렉스 미션 책임자들은 우주선을 베누의 암석 표면에 터치다운(착륙)하는 위험을 감수하지 않기로 결정했다. 소행성의 경우 통상적으로 탐사선이 튕겨나가거나 부서지기 쉬운 바위로 돼 있어 소행성을 깨뜨리지 않고 착륙할 수 있는 소프트로봇 착륙선이 요구된다. 착륙할 경우 자칫 일이 잘못되면 우주선이 우주미아가 돼 버릴 수도 있는 것이다.
이 임무 부책임자인 마이크 모로는 이미 지난 2020년 “우리는 필요 이상으로 표면과 접촉하는 데 따른 불확실성에 더 이상 대처하고 싶지 않았다”고 밝힌 바 있다.
담당 과학자들은 오시리스 렉스 우주선 하부에 달린 긴 표본 추출 팔로 그 소행성을 찔러 표토를 채취하는 방식을 생각해 냈다.
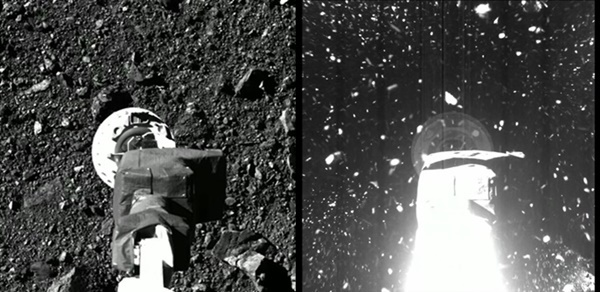
오시리스-렉스는 2020년 10월 베누 소행성에 접근한 샘플채취 로봇팔 끝에 태그샘(TAGAM)이라고 불리는 원통형 장치를 탑재해 베누 표면에 하이파이브(터치)함으로써 샘플을 수집했다. 태그샘은 터치앤고샘플채취 메커니즘(Touch-And-Go Sample Acquisition Mechanism)의 준말이다. 태그샘은 베누 표면으로 질소 가스를 폭발시키듯 발사해 바위와 토양을 작은 샘플 수집실로 뒤섞여 들어오게 했다. 이 작업은 매우 성공적이어서 샘플 수집실의 플랩이 소행성 물질에 의해 걸려 열렸다.
결과적으로 오시리스-렉스는 왕복 7년이나 걸리는 그 먼길을 가서 베누를 도는 데 2년 이상을 보냈고 최종적으로 ‘총 16초’ 동안 이 소행성에 ‘터치만’ 했을 뿐 그이상의 작업없이 표토를 채취해 오는 데 그친 것이다. 과학자들로선 엄청나게 아쉬울 수 밖에 없었을 것이다.
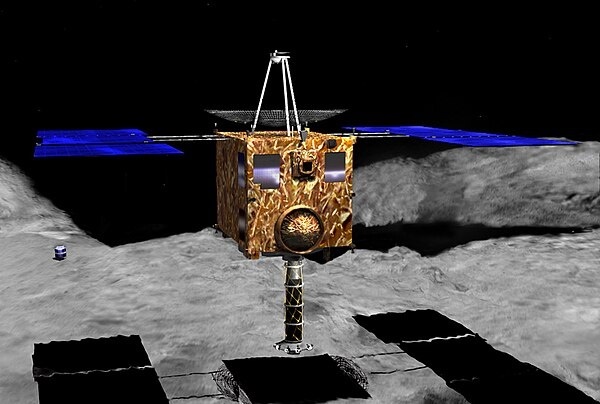
이는 지난 2010년 7년여 동안의 이토카와 소행성 표토채취 왕복여행을 마치고 샘플과 함께 호주 우메라 사막으로 귀환한 일본의 하야부사 우주선도 마찬가지였다.
소행성에 착륙할 우주선이 표면에 붙어있게 하는 연구
그렇다면 앞으로 소행성 착륙선을 보낼 때도 소행성 표면에 부드럽게 착륙해서 좀더 긴 시간동안 여유있게 표토를 채취하기 위한 소프트 착륙은 요원한 일일까.
반드시 그렇지만은 않을 것 같다. 일군의 미국 과학자들이 이런 연약한 구조로 돼 있는 소행성 착륙이 가능한 소프트로봇을 개발해 소프트랜딩 성공 가능성에 기대감을 더하고 있다.
이게 가능해지면 그다음 단계로 소행성에서의 희귀금속 채굴이든 뭐든 가능해지게 될 것이다.
향후 이러한 소행성에 처음 소프트랜딩 하는 영예는 아마도 콜로라도 볼더 대학교 제이 맥마흔과 그의 동료들이 6년 이상 작업해 온 변신형 소프트봇의 역할이 될 것으로 보인다.
맥마흔의 팀은 2017년에 나사의 혁신적 고급 개념(NASA Innovative Advanced Concepts) 프로그램으로부터 약간의 자금을 지원받았는데 최근 자신들의 기술 중 일부를 위성 궤도 상 서비스나 우주 쓰레기 제거에 적용할 수 있는지에 대해 연구하고 있다. (맥마흔 팀은 오시리스-렉스와 다트(DART)를 포함한 다른 임무를 맡은 과학자들이기도 하다. 다트임무는 지난해 소행성의 궤도 경로를 바꾸기 위해 작은 소행성에 충돌 시험한 임무다.)
이들은 작은 소행성들에 안착하는 데 있어서의 어려움부터 살펴보기 시작했다.
우선 착륙선 모선이 실제로 소행성을 파헤치거나 돌을 걷어올려 채취하는 것은 어떨까? 이 경우 표본 추출 도구가 작동하는 동안 모선의 다리가 모선을 붙잡고 있어야 한다.
그런데 아마도 많은(아마도 대부분의) 소행성들이 단단한 바위로 이뤄져 있지 않다. 지름이 10km 미만인 소행성의 경우 이른바 돌무더기일 가능성이 높다. 이런 무더기들은 약한 힘으로 결합돼 있다.
특히 돌무더기는 우주선에 위험하다. 오시리스-렉스가 표본 추출용 팔로 베누의 지각 표면을 부드럽게 부딪쳤을 때 과학자들은 그것이 최소한의 저항으로 바로 뚫려 돌과 흙이 사방으로 쏟아져 내리는 것을 보고 깜짝 놀랐다.
소행성을 탐험하거나 아마도 그것을 채굴하려면, 먼저 그곳에 접근할 방법이 필요하다. 그리고 나서 그것을 엉망으로 만들지 않고 표면에 자리잡아야 한다. 지금까지의 소행성 미션들은 소행성의 표토 샘플을 채취하기 위해 작살과 추진기를 시도했고, 이런 수단으로 임무 수행을 하기 위해 힘든 시간을 보냈다.
그래서 생각해 낸 것은 돌무더기 소행성 위에 로봇(우주선들은 모두가 로봇이다)을 세워놓고 싶다면 좀더 부드러운 접근방법이 준비돼야 한다는 것이다.
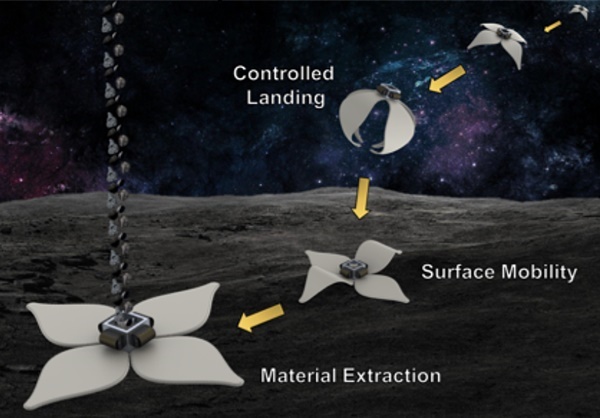
맥마흔과 그의 팀은 지난 2018년 나사에 제출한 보고서에서 모선에 의해 소행성 주위의 궤도로 비행하는 소프트로봇(또는 소프트로봇군)을 상상해 볼 수 있다고 썼다. 그 착륙로봇에 보이는 꽃잎같은 부분들은 부분적으로는 이전 우주선에 사용되었던 유연한 물질인 실리콘 탄성 중합체로 만들어질 수 있다.
이 소프트봇은 에이오이에스(AoES)로 불린다. 에이오에스는 ‘효과 범위 소프트봇(Area-of-Effect Softbots)의 줄임말이다.
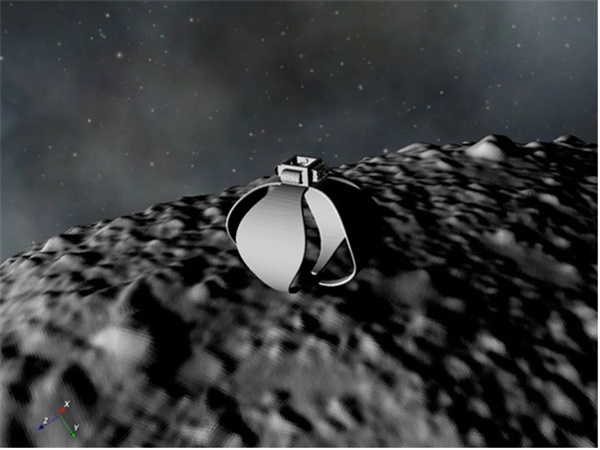
우주선 렌더링을 보면 이 로봇은 수련(睡蓮)을 닮았다. 꽃잎이 똑바로 펼쳐지면(아마도 몇 미터 연장될 것이다) 태양 돛의 역할을 할 수 있으며, 필요한 경우 소프트봇을 표면으로 천천히 안내하고 착륙시 충격을 완화하기 위해 몸을 동글게 만다(오무린다).
맥 마흔은 “자신을 억제할 방법을 찾을 필요가 있지만 동시에 (착륙로봇의 착륙부분이)너무 부드럽더라도 가라앉지 않는 방법을 찾아야 했다. 그래서 이 ‘넓은 면적’을 표면적에 펼치는 아이디어가 나왔다”고 말했다.
초기 버전에서 아 소행성 착륙선 로봇의 꽃잎은 큰 디스크였다. 그런데 꽃 디자인이 더 효율적인 것으로 나타났다. 즉, 꽃잎이 똑바로 펼쳐지면(아마도 몇 미터 연장될 것이다) 태양 돛의 역할을 할 수 있고, 필요한 경우 소프트봇을 표면으로 천천히 안내하고 착륙시 충격을 완화하기 위해 몸을 동글게 만다(오무린다).
수련을 닮은 우주선 설계가 착륙후 소행성 자체에 맞춰 모양을 바꿀 수 있다는 것 외에 또다른 이점이 있다. 중력이 충분히 크지 않은 소행성 같은 곳에서 표토 채취용 소프트로봇이 훨씬 더 작은 힘을 사용해 움직일 수 있다는 점이다.
더 중요한 것은 꽃잎이 충분히 커서 질량에 비해 표면적이 매우 넓다는 점이다. 이 꽃잎이 소행성 표면에 펼쳐지면 소행성 표면을 잡고 있기가 좋아진다.
또한 이때 정전기가 생기면 물체가 자석처럼 서로 붙는 성질인 전기 부착, 태양 복사, 그리고 게코도마뱀도 사용하는 분자 사이의 끌어당기는 힘인 반데르발스 힘과 같은 힘을 사용할 수 있게 된다. 특히 작은 전하로 보충된 반데르발스 힘으로 자연스럽게 우주선을 을 소행성 표면쪽으로 끌어당기게 할 수 있을 것으로 기대를 모은다. 게코도마뱀처럼 우주선도 불안정한 소행성 표면에 안정되게 붙어 있을 수 있게 된다는 얘기다.
나사 소행성 연착 연구팀의 맥마흔은 “소행성 환경에서는 중요하지는 않지만 작용하는 정전기력이 존재한다. 이곳의 중력은 너무 약해서 지구에 존재하는 앞서의 힘들이 아주 미미하기 때문에 기본적으로 무시해야 하는 이상한 곳이다. 하지만 이 힘들을 흥미로운 방법으로 이용할 수는 있다”고 말한다.
맥마흔과 그의 동료들은 수압으로 증폭된 자가 치유 정전기식(Hydraulically Amplified Self-Healing Electrostatic·HASEL)액추에이터로 충전하거나 끌 수 있으며, 한 번에 꽃잎부의 한 부분에만 영향을 미칠 수도 있다고 말한다.
여기서 더 나아가기 전에 현재로선 우주 소프트봇이 나중에 실현될 장기적인 생각이라고 말하는 것이 중요하다.
연꽃에서 영감받은 소프트로봇, 이동도 손쉽다

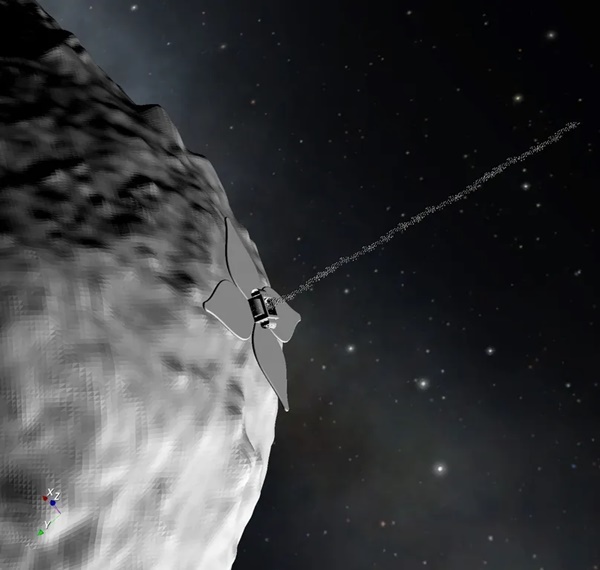
우주선이 나쁜 곳에 착륙하거나 소행성의 다른 부분으로 이동하고 싶다면 어떻게 해야 할까? 이 소프트봇은 꽃잎을 구부려 애벌레처럼 원하는 곳으로 기어갈 수 있다.
필요하다면 이 우주선은 태양돛이 항해할 때처럼 꽃잎을 다시 열쳐 한 곳에서 다른 곳으로 천천히 점프할 수 있다.
중요한 것은 연료를 많이 사용하지 않고 작동한다는 것인데, 연료는 무겁고 양이 한정되어 있으며, 소행성을 오염시킬 수도 있다.
콜로라도 팀이 소프트봇 개념을 매우 철저하게 설계했음에도 불구하고, 새로운 기술이 출범하는데 필요한 경제적, 정치적 조작은 말할 것도 없다. 또한 지침, 항해, 동력, 질량 및 기타 많은 세부 사항들이 여전히 해결되어야 한다는 점도 분명하다.
현재 설계된 AoES 차량은 결코 날 수 없을지 모르지만, 그들의 아이디어는 미래의 우주선 안으로 들어갈 수도 있다.
맥마흔은 “이 개념은 많은 어려움을 우아하게 극복한다”고 자신한다.
오는 24일 오시리스-렉스가 지구 상공 10만km에 이르러 베뉴샘플을 떨어뜨릴 때 연꽃처럼 설계된 미래 소행성 우주선의 소프트랜딩하는 모습을 상상해 보면 흥미로울 것이다.
아래 동영상은 오는 24일 지구로 베누 샘플을 떨굴 오시리스-렉스가 어떻게 베뉴 소행성에 착륙하지 못한 채 암석과 흙을 채취했는지 보여준다.