호주에서 악명 높은 외래 침입종 물고기들이 고향인 북미의 포식자를 본뜬 가짜 로봇 물고기를 본 후 몇 주 동안이나 공포에 떨며 성장과 생식이 저해될 정도로 영향을 받았다는 연구결과가 나왔다.
웨스턴오스트레일리아 대학교 박사후 과정인 지오반니 폴베리노와 동료들은 대형 배스(농어) 로봇 실험 결과를 아이사이언스 16일자에 발표했다.
이 결과가 전세계 각국의 외래 생태 교란종을 막고 토종 물고기 등을 보호하는 데 활용될 수 있을지에 관심이 쏠린다.
모기 물고기는 북미 원산이지만 원 서식지에서 유럽과 호주를 포함한 전 세계 다양한 지역으로 퍼진 특히 성가신 외래 침입종이다. 길이 3cm 정도인 이 작은 물고기는 모기 알과 유충을 잡아먹는다 해서 전세계로 퍼졌는데 외래종이 그렇듯이 호주의 다른 토착종 물고기와 올챙이 꼬리를 씹는 것은 물론 다른 민물 거주종들의 알까지 먹어치운다.
이 물고기는 외래 침입종이기에 겁이 없는데다 그들이 서식하는 새로운 환경에는 포식자도 없다. 하지만 호주 연구진을 포함한 생물학자와 공학자로 구성된 국제연구팀이 이 문제에 대한 해결책을 찾았다. 그것은 바로 이 물고기의 포식자인 큰입 배스(농어)를 흉내낸 로봇 물고기였다.
외래 교란종인 모기물고기는 호주로 건너와서는 포식자가 돼 이처럼 호주 토착종 민물고기와 올챙이들 사이에서는 무법자다. 하지만 이 모기물고기도 원산지인 북미에서는 큰입배스의 먹이에 불과하다. 북미에서는 어린 큰입농어가 정기적으로 모기물고기 종을 먹는다. 이 포식자에 대한 원시적인 두려움은 이들이 전세계로 퍼지는 동안에도 모기물고기들에게 남아 있다.
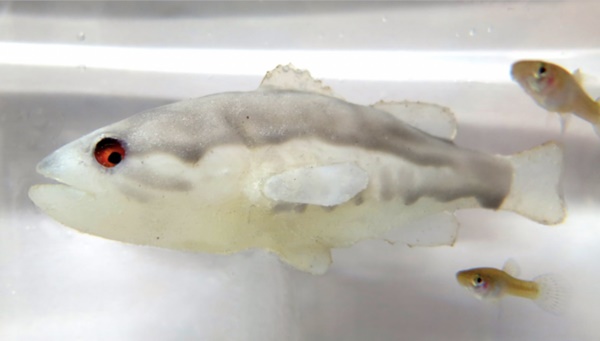
이에 과학자들은 큰입농어 로봇으로 모기물고기에게 공포를 주입하는 방안을 생각해 냈다.
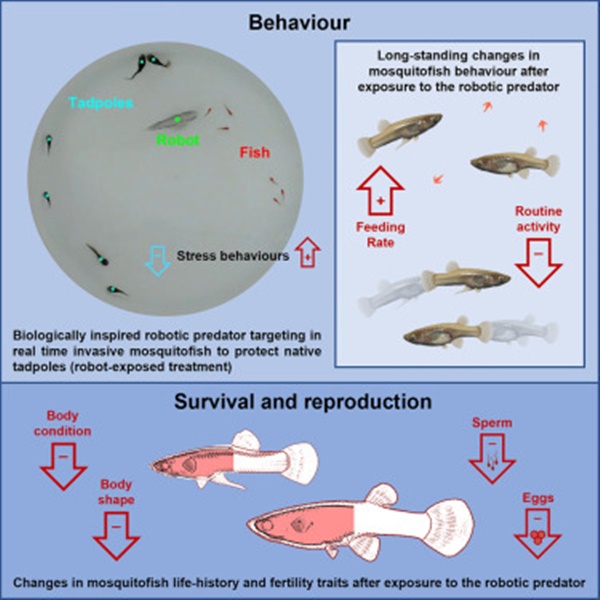
그 결과 큰입농어 로봇이 몰고 온 공포는 모기물고기의 성장과 생식까지 방해하면서 토종 민물고기와 올챙이들을 보호한다는 연구 결과로 이어졌다.
폴베리노 팀의 새로운 연구는 이 로봇 배스가 모기물고기에게 두려움을 심어줄 수 있다는 것을 결정적으로 확인시켜 주었다. 연구진에 따르면 모기물고기는 번식력이 떨어지고 몸무게가 줄면서 생존 능력에도 영향을 받았다.
연구팀은 “우리는 모기물고기들이 이 원주민 포식자에게 가지고 있는 선천적인 두려움을 이용했다”고 말했다.
큰입 농어 로봇의 최신 버전은 상당히 진보됐다. 연구팀은 모기물고기를 겁주기 위해 로봇이 진짜처럼 보이고 행동하도록 만들었다. 이 로봇은 이제 꽤 똑똑한 기계가 됐고 언제 모기물고기가 (올챙이를 포함한)다른 수중 동물들을 공격하기 위해 움직이는지도 인식할 수 있게 됐다.
폴베리노는 “이 로봇은 모기물고기 무리와 토착종 올챙이 무리 사이에 무슨 일이 일어나고 있는지 이해할 수 있고, 그리고 나서…포식 행동을 방해할 수 있다”고 말했다.
연구팀은 이 새로운 연구를 위해 모기물고기와 다른 호주 토종 종 개구리의 올챙이들이 있는 탱크에 큰입농어 로봇을 넣었다. 모기 물고기가 토종 물고기를 잡아 먹으러 갈 때 로봇농어가 개입해 그들을 겁주어 쫓아냈다. 호주 토착종들은 그 어느 것도 큰입 농어를 본 적이 없어서(인지) 두려워하지 않았다.
그는 “호주에 있는 종들은 전혀 [큰입농어]에 대한 경험이 없다”고 말했다.
그러나 모기물고기들은 여러 세대를 거치면서 큰입 농어의 두려움을 배웠기 때문에 영향을 받았다. 연구원들은 연구기간 동안 주기적으로 모기물고기들을 다른 탱크로 옮겼다.
연구팀은 침입종들이 무리로 머무르며 탱크 중앙을 거의 떠나지 않는 등 불안감을 드러내는 것을 보았다. 그들은 또한 더 작아졌고 더 적은 정자와 더 적은 난자를 생산했다. 이 문제들은 몇 주 동안 지속되었다. 약 1년 정도 사는 물고기로서는 상당한 시간이다.
이론적으로 이같은 로봇 접근법은 다른 물고기들과 수생 동물들에게도 사용될 수 있는데, 이는 거의 모든 동물들이 두려움을 느끼기 때문이다.
그러나 폴베리노는 이 로봇 농어를 조만간 야생에 방사할 계획은 없다고 말했다. 지금까지 이 로봇은 실험실에서만 연구됐다. 야생에서는 씨름해야 할 다른 많은 요소들이 있다. 그는 “이것은 개념 증명”이라고 말했다.
하지만 호주에는 이 로봇을 시험해 볼 수 있는 덜 복잡한 체계의 몇몇 작은 수역이 있다. 심각한 멸종 위기에 처한 작은 물고기인 ‘에드바스톤 고비(Edgbaston goby)’의 고향인 에드바스톤 보존 지역의 작은 연못같은 곳이다.
향후 이 수역에 로봇 농어를 방류하는 것은 멸종 위기에 처한 토착 물고기 종들을 보호하는 데 도움이 될 수도 있다.
그는 “그러나 앞으로 단기간(2년) 안에 이 기술이 널리 적용될 수 있을지는 알 수 없다”고 말했다.
그는 아마도 로봇물고기가 토종 물고기에 스트레스를 줄 가능성을 고려하고 있는지도 모른다.
하지만 이 연구 결과를 바탕으로 한 좀더 발전된 성과가 있기를 기대하게 만드는 것도 사실이다.
우리나라에서도 로봇 물고기가 화제가 된 적이 있다.
지난 2009년 11월 이명박 대통령이 ‘대통령과의 대화’에서 수질관리를 위해 로봇물고기를 개발해 4대강에 풀어 넣겠다고 공언했다. 이어 생산기술연구원 연구팀이 2010년 6월부터 정부 예산 57억원을 지원받아 2013년 6월 과제 수행을 마무리했고 국책 연구개발사업 평가기관인 산업기술연구회가 두 달 뒤 해당 과제에 성공한 것으로 판정했다.
안타깝게도 감사원이 외부전문가들과 함께 최종 개발 보고서를 점검한 결과 무용지물이나 다름없다는 평가가 나왔다.

감사원은 이 로봇 물고기의 유영 속도와 수중 통신거리 등 핵심 기능이 모두 목표치에 미달했다고 밝혔다. 시제품의 경우 9대 중 7대가 고장 난 상태라 주요 성능과 군집제어가 가능한지 확인조차 할 수 없다는 지적이 나왔다.
감사원에 따르면 로봇물고기는 1초에 2.5m를 헤엄쳐야 하는데 실제로는 초당 23cm 밖에 나가지 못했다. 또 로봇물고기에는 수온·산성도·전기전도도·용존 산소량·탁도 등 5종의 생태모니터링 센서가 탑재돼야 하지만 탁도 측정센서는 장착돼 있지 않았다. 심지어 테스트 도중 센서가 장착된 로봇의 작동이 중단돼 측정할 수 없는 상황도 발생했다. 사업계획서에 명시된 수중 통신속도는 4800bps에 못미치는 200bps, 통신 거리도 500m에 훨씬 못 미치는 50m로 각각 시연됐다.
아직까지 로봇물고기는 4대강에서 전혀 볼 수 없다.
왜 4대강 로봇 물고기가 실패했는지에 대해서는 여러 가지 이유가 있을 수 있다. 아직 개발이 덜 된 상태에서 성급히 포장해 성공작으로 내놓고 싶어했던 결과였을 가능성도 있다. 이외에 생각해 볼 수 있는 다양한 실패 요인들을 따라가 보자면 ▲수중에서는 출력 대비 도달거리가 짧아 원하는 통신이 쉽게 이뤄질 수 없다는 점 ▲(작은 물고기 로봇에 넣기에 충분한)수질분석용 센서개발 미흡 ▲로봇 물고기가 아직까지 살아있는 물고기처럼 빠르게 움직이지 못한다는 점 등이 꼽힌다.
올해 국내 로봇 업계의 분위기는 상당히 좋다. 올해 최고의 거래(M&A)로 평가받고 있는 현대그룹의 세계적 로봇 회사 보스턴다이내믹스 인수 소식에 이어 삼성전자의 로봇 사업 본격 진출 소식이 그것이다. 덩달아 국내 로봇업계의 주가도 크게 오르고 있다. 우리나라 로봇 산학연의 선전을 기대해 본다.


















소셜댓글