영화 ‘아이로봇’(2004)에 등장한 인간을 닮은 2족 보행 안드로이드들을 기억하는가. 이들은 영화에서 육상선수처럼 빠르게 뛰는 모습을 보여주기도 했다. 물론 아직까지 그런 2족 보행 로봇은 없다. 그 정도는 아니지만 최근 우리가 알던 간신히 걷던 2족 보행 로봇이 어느 새 진화해 5km 정도를 스스로 뛰어 다니는 모습을 과시했다. (혼다의 아시모가 천천히 어그적 거리며 걷는 모습이나 보스턴 다이내믹스의 아틀라스 로봇이 줄에 매달린 채 런닝머신 같은 곳 위를 걷던 모습을 생각해 보면 엄청난 진화가 있었음을 알 수 있다.)
미국 오리건주립대(OSU)가 이러한 2족 보행 로봇을 개발해 공개했다. 지난달 말 로보틱스 학회에 소개된 이 연구결과가 화제다.

2족 보행로봇이 달리려면 지속해서 균형을 잡고 넘어지지 않아야 한다. 따라서 고도의 정교함을 필요로 한다. 이 점에서 보스턴 다이내믹스의 안정된 ‘4족 보행’을 하는 개 로봇 ‘스팟’과도 또 다른 프로그래밍이 필요하다.
2족 보행 로봇이 이처럼 안정적 보행을 한다면 최근 들어 부쩍 수요가 증가하고 있는 물품 배달에 더할 나위없이 도움이 될 것 같다.
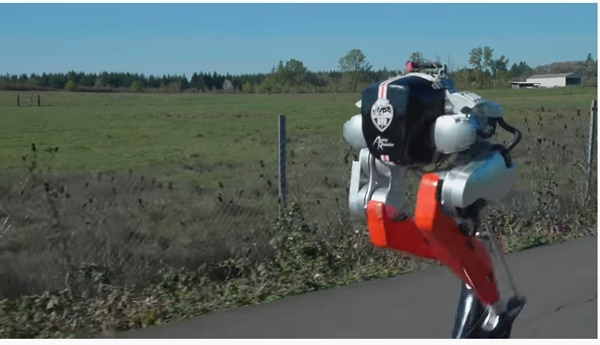
‘캐시(Cassie)’라는 이름의 이 2족보행 로봇은 그동안 단순히 걷는 데서 더 나아가 기계학습을 통해 스스로 달리는 방식을 학습했고, 이어 한번 충전해 오리건주립대 캠퍼스길 5km를 53분여 만에 스스로 달려서 돌아왔다.
이로써 캐시는 실외 지형을 달리는 걸음걸이를 제어하기 위해 기계 학습을 사용한 최초의 2족 로봇으로 기록됐다.

대부분의 로봇들이 기존 환경에 적응하지 못하는 상황에서 보여준 캐시의 이번 성과는 역사적인 쾌거로 받아 들여진다. 로봇이 인간과 비슷한 두 다리만을 사용해 자갈길, 인도, 들판으로 이뤄진 여러 야외 지형을 안정적으로, 그리고 다양한 속도로 이동할 수 있다는 것을 증명했기 때문이다.
캐시는 얼핏 보기에는 몸체가 없는 타조가 목적 없이 뛰어다니는 모습처럼 보일 수 있다. 하지만 이 이상하게 생긴 거의 새처럼 생긴 로봇의 이번 시험결과가 얼마나 중요한지는 캐시의 상체에 조작용 손을 달고 물품을 나른다고 생각해 보면 금세 알 수 있다. 실제로 그런 로봇 인 ‘디지트’(Digit)가 나와 있기도 하다. 다만 이번에는 캐시를 이용해 달리기 능력을 실제로 증명했다.

오리건주립대 연구팀의 스핀아웃 업체인 어질리티 로보틱스가 캐시를 만들어 출시한 것은 지난 2017년의 일이다. 당시 연구팀은 캐시가 험한 환경에서, 그리고 광범위한 연구에 사용하기위해 만들었다. 그래서 몸체를 줄에 매달고 계단을 오르는 등 험한 환경에서의 시험도 여러 번 거쳤다. 캐시의 배터리 수명은 하루 종일 지속됐다. 낮은 수준으로 제어할 수 있게 개방형 아키텍처를 제공하는데, 이는 다리로 이동하는 방식과 새로운 관련 기술 제어 방법을 개척하기 위해서였다.
이어진 이번 오리건주립대 연구소의 쾌거는 지난 몇 년 동안 캐시에 기계 학습을 적용해 온 노력 끝에 이룬 결실이다.
캐시가 소개된 이후 오리건주립대 학생들은 미국립과학재단(NSF)과 미국방고등연구계획국(DARPA)의 머신 커먼센스(Machine Common Sense) 프로그램 자금을 지원받았고, 앨런 펀 인공지능(AI) 교수와 공동으로 로봇이 달릴 수 있게 해 줄 인공지능(AI) 학습 옵션을 모색했다.
로봇이 넘어지지 않고 달리기를 할 수 있으려면 위치를 바꾸거나 움직이는 동안 동작을 유지하면서 균형까지 유지해야 한다.
연구팀은 캐시가 달리기를 배울 수 있도록 AI의 일종인 심층 강화 학습 알고리즘을 사용했다. 이는 캐시가 시행착오를 통해 학습하고 빠른 속도로 다시 최적화할 수 있게 해 주었다. 즉 캐시는 이 학습을 통해 움직이는 동안 직립을 유지하기 위해 무한히 미묘한 조정을 하는 법을 배웠다. 타조처럼 구부러진 무릎을 가진 캐시는 이 방식으로 달리기를 독학했다.
마침내 이 팀은 생체 기계학 및 기계학습 툴을 결합해 캐시가 스스로 제어해 넘어지지 않고 달리기할 수 있게 만들었다.
예쉬 고세 연구실 학부생은 “심층 강화 학습은 AI에서 달리기, 건너뛰기, 계단을 오르내리기 등 기술을 열어주는 강력한 방법”이라고 설명했다.
물론 캐시가 5km를 달리는데 걸린 총 53분 3초의 시간에는 약 6분 30초간의 리셋 시간이 포함됐다. 한번은 컴퓨터가 과열됐기 때문에, 또 한 번은 너무 빠른 속도로 턴을 실행하도록 요청받았기 때문에 넘어진 것이었다. 각각 인간에 의한 리셋 과정이 필요했다.
이 연구소의 박사과정 학생인 제레미 다오는 “캐시는 설계와 제작 방식 때문에 매우 효율적인 로봇이다. 우리는 하드웨어의 한계까지 도달할 수 있었으며, 이 로봇이 무엇을 할 수 있는지 보여주었다”고 말했다.
오레곤주립대와 어질리티 로보틱스는 지난 2017년 캐시 공개 이후 캐시처럼 타조의 발에서 영감을 받은 디지트도 내놓았다. 디지트는 걷고 계단을 건너뛰고 오르내릴 수 있으며 기본적인 조작 작업을 위한 두 손을 가지고 있다. 캐시와 디지트는 이 대학 다이내믹 로보틱스 랩이 개발한 최초의 로봇 아트리아스(ATRIAS)로부터 시작됐다. 아트리아스가 로봇이 달리는 캐시와 계단을 오르내리는 인간 보행 역학을 재현한 디지트의 원조인 셈이다.

오리건주립대 측은 이번 캐시의 달리기 실험이 인간과 로봇이 함께 걷는 미래를 위한 길을 열어줬다는 점에 의미를 부여하고 있다.
조너선 허스트 오리건주립대 로봇공학 연구소장이자 어질리티 로보틱스 공동 설립자는 “이 두발 로봇은 택배와 같은 물류 업무 외에도 결국 자신의 집에 있는 사람들을 도울 수 있는 지능과 안전 능력을 갖추게 될 것”이라고 말했다.
그는 이어 “언젠가 걷는 로봇이 자동차와 비슷한 흔한 광경이 될 것이며 그와 비슷한 충격을 줄 것이다. 그간 이를 제한하는 요소는 다리 움직임에 대한 과학과 이해였지만 이번 연구가 이의 돌파구를 마련해 준 셈이다”라고 덧붙였다.
오리건주립대는 지난달 25일 이 로봇에 대한 성과를 발표했다. 허스트 교수와 동료들은 지난 7월12일부터 16일까지 열린 ‘로보틱스, 사이언스 및 시스템’ 컨퍼런스에 이 논문을 제출했다.
아래 동영상은 캐시의 앞 세대인 아트리아스, 캐시의 제작과정, 그리고 오레곤주립대 캠퍼스를 달리는 캐시의 모습을 차례대로 담고 있다.

















소셜댓글